ZED SDK
Unleash the power of 3D Vision. Start building applications with the ZED SDK today.
SDK Download 5.0Latest Stable Release
Windows | Linux | Jetson


The ZED SDK is one of the industry’s most advanced, scalable and customizable AI Vision framework, used by 100,000+ users around the world. It provides multiple features allowing you to build any vision-based applications very easily.

End-to-end spatial perception platform for human-like sensing capabilities.

Real-time performance: all algorithms of the ZED SDK are designed and optimized to run in real-time.

Reduce time-to-market with our comprehensive, ready-to-use hardware and software designed for multiple applications.

User-friendly and intuitive, with easy-to-use integrations and well-documented API for streamlined development.

Wide range of supported platforms, from desktop to embedded PCs.
Our advanced sensing technology, powered by vision, gives autonomous machines sight, and insight, in the world. ZED cameras capture rich data in texture and color. Unlocking a level of detail unreachable by LiDAR or radar, at a fraction of the price.

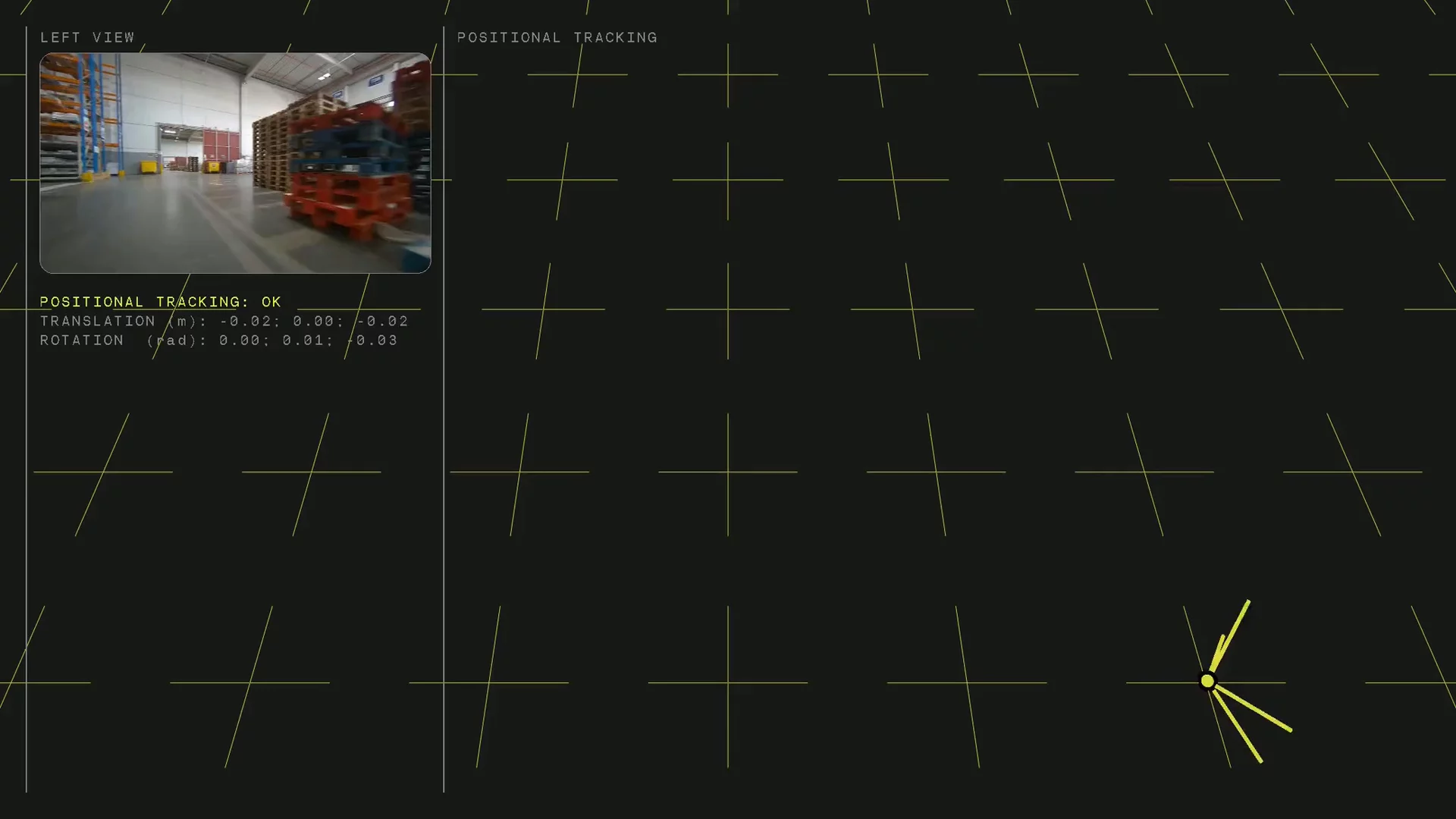
High accuracy localization based on visual-inertial odometry in indoor environments or GNSS-denied areas.
With the ZED SDK, generate a real time occupancy map of the robot environment, allowing for safe navigation, in both indoor and outdoor unstructured environments.

Understand how people move throughout a space with ZED and ZED SDK.

High precision 3D positioning can be achieved by fusing localization data from ZED X cameras and global navigation satellite systems (GNSS).

Detect moving obstacles whether it be persons or objects.

Use the ZED with your favorite platforms and libraries. Make sure to check our Docs and GitHub page for the latest integrations!





















